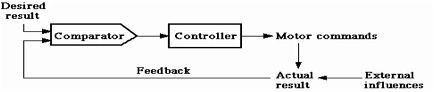
Terms originating in engineering and transferred to the study of motor control. Closed-loop control refers to control achieved by feedback such that the actual response conforms to the desired response (or set point) by means of correcting any difference between them. The feedback path, input to output and back to input, forms what is called a closed loop (e.g., monosynaptic reflex arc, cortico-cerebellar loops). In contrast, open-loop, or predictive control, involves control only by an input signal, without the benefit of feedback. In this form of control, the input signal is amplified so as to drive the motor to perform the desired outcome. Aiming movements of the hand toward a target that are performed too quickly for proprioceptive feedback to have occurred are typically given as an example of open-loop control. In engineering, closed-loop control systems are generally preferred to those based on open-loop control because they respond and move the loads they are controlling quicker and with greater accuracy. In the study of motor control, however, it was realised in the 1970s (mainly through the work of Emilio Bizzi) that the models based on the closed-loop control of movements had a number of shortcomings. Chief among these is that there are considerable propagation delays in provision of sensory feedback in various modalities that could not account for the likes of fast aiming movements (e.g., simple and choice visual reaction times are in order of 230 and 420 ms, respectively). The explanation offered for such movements is that the central nervous system determines in advance the trajectory and the ratios of muscle co-contractions. As consequence, the role of closed-loop control was restricted to slow and fine modifications of posture, adjustments made to new or odd postures, and motor learning. Current models of motor control involve combinations of both forms of control in order, for example, to account for the interaction between movement and posture in the execution of goal-directed actions such as reaching and grasping. Simplified representations of closed-loop and open-loop control are presented in the two figures below.